
前引在接收到短信之后会将内容较大的短信内容拆分到不同文件中保存,在之前的自动转发脚本转发短信文本内容不全解决最近在阅读gammu官方文档的时候发现官方有个Processing message text in Python 的示例:Following sc...
阅读全文...
树莓派访客抓拍视频版
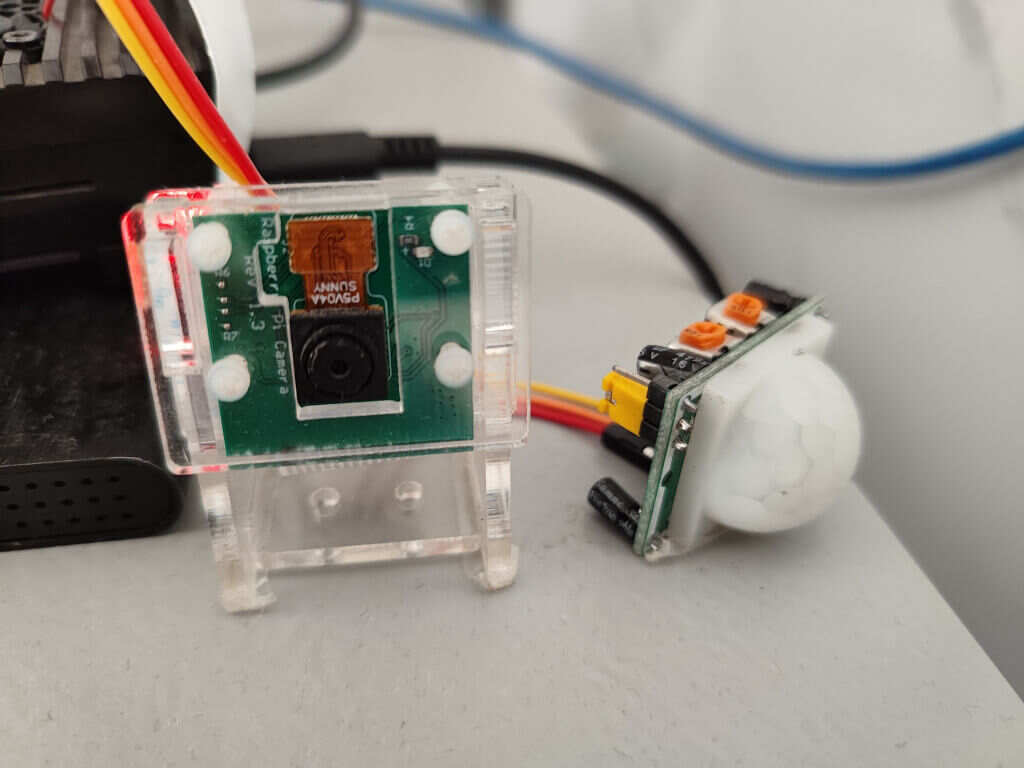
前引由于在对移动的人体进行拍照的效果并不好,所以对抓拍图片版进行了升级,通过人体红外感应器在来访人员进入房间后录制视频,视频能比较好的看清来访人员起到看家的作用。拍照版{% link 树莓派64位系统实现对访客抓拍,Mstzf,https://mstzf...
阅读全文...
阅读全文...
树莓派64位系统实现对访客抓拍
前引最近由于一些原因,一个人在外面租房住,老是担心会有人进到出租屋里面来(被害妄想症吧 (~ ̄▽ ̄)~),也刚好有些小模块可以实现对访客监控的功能,就做了这个环境树莓派4B人体红外传感器HC-RC501SCI摄像头(感光芯片OV5647)树莓派操作系统 ...
阅读全文...
阅读全文...

利用Python对Excel文字数字混合的数据保留小数
{% note orange 'fas fa-battery-half' simple %}计算机中要安装有python才可以使用{% endnote %}在python对Excel的读写操作中,本人感觉使用xlwings还是一种比较好的方法import...
阅读全文...
阅读全文...
DHT11温湿度模块部分代码实例
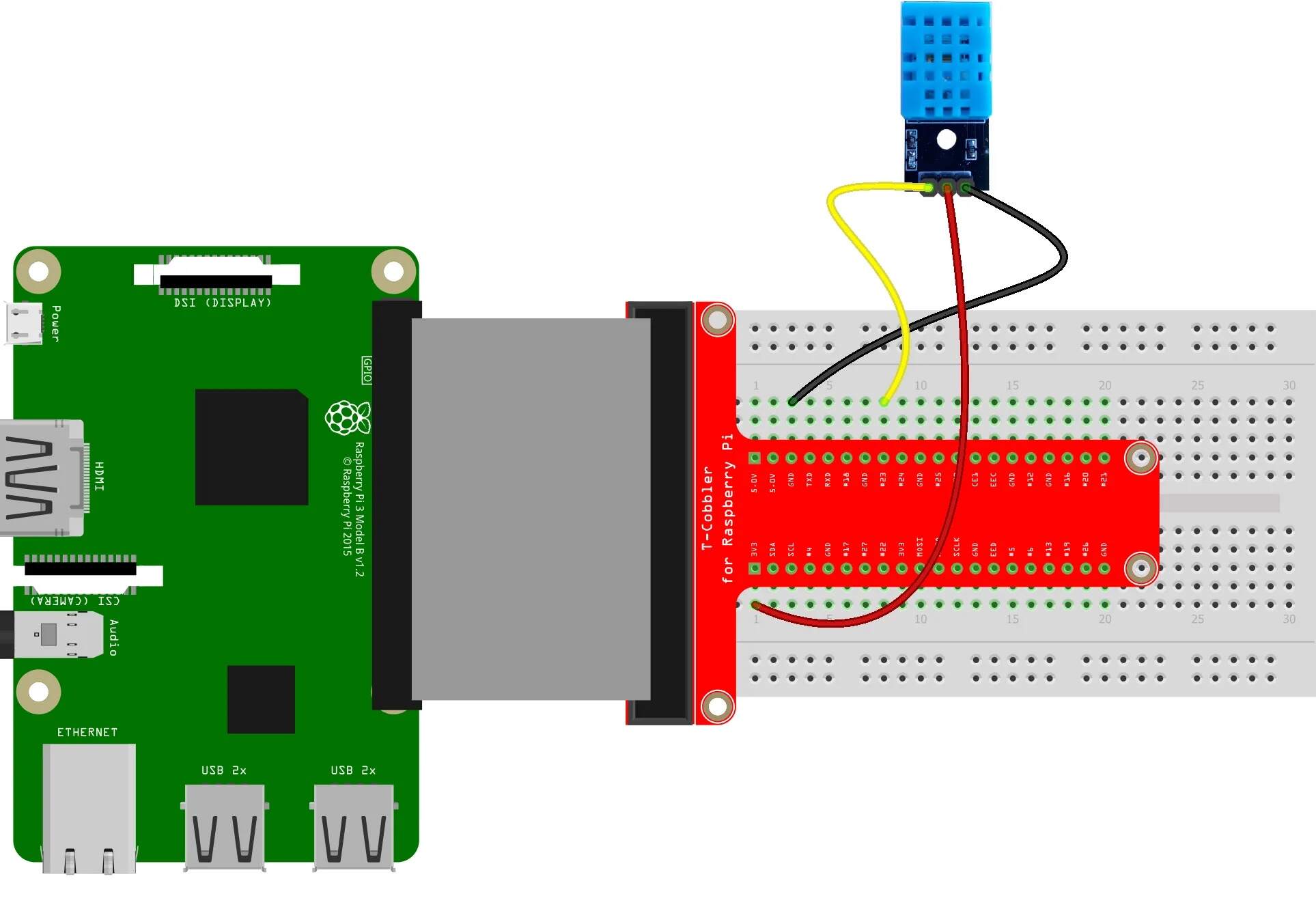
产品概述DHT11数字温湿度传感器是一款含有已校准数字信号输出的温湿度 复合传感器。应用专用的数字模块采集技术和温湿度传感技术,可以将获取到的环境温湿度信号通过单总线传输;信号中携带有校验码,一定程度上保证了数据的准确性。性能指标参数最小最大温度范围-2...
阅读全文...
阅读全文...









